Second LPT Challenge Case 1: Results
This page presents published results for Case 1 of the 2nd LPT Challenge. The link for result submission, as well as details about the test case and rules for result are given there.
Tables can be ordered according to each of the quantities reported. Clicking on an algorithm name in a table will open a page gathering its result, together with information on the submitter.
Definition of performance metrics
Evaluation pertains to both particle localization, at the two pulse times t0 and t1, and estimation of the displacement vectors. For either particles or vectors, we count :
- a True Positive (TP) if a ground truth (GT) particle is found in the neighborhood of a detection (maximum componentwise distance less than 1 voxel). For vectors, both detections should be TPs and associated to the same GT particle.
- a False Negative (FN, a.k.a. missed particle) if there is no detection in the neighborhood of a GT particle. A FN vector is a GT vector that is not associated to a TP vector.
- a False Positive (FP, a.k.a. ghost particle/vector) particle/vector when it is not a TP particle/vector.
Precision and Recall are derived quantities reflecting the detection performance, defined as:

Root-mean-square (rms) errors, whether on particle position, velocity or acceleration, are defined by considering only the TP within the result. Corresponding units are as follows:
- Position errors (raw and fitted) are given in voxel, with a voxel size here equal to 110 µm
- Velocity errors are dimensionless, with corresponding reference velocity Vinf = 0.2 m/s
- Acceleration errors are dimensionless, with corresponding reference acceleration Ainf = Vinf2/D = 40 m/s2, where D = 0.1 m is the channel half-width (see there for more information on the physical setup).
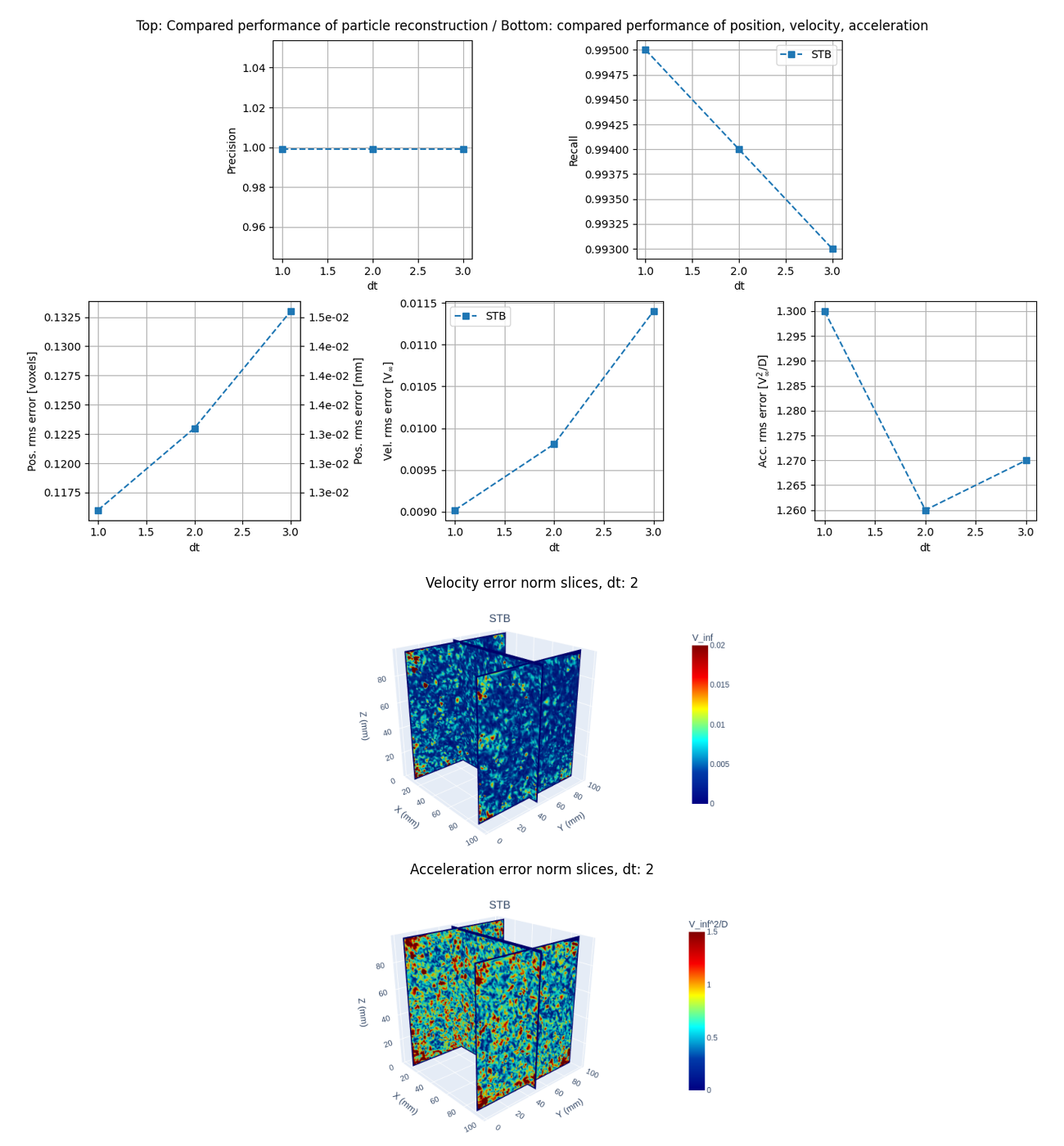
Below, we provide tables showing these quantities for all test points. Then, we show figures comparing these quantities among participants, as well as groups of error slices for velocity and acceleration at a given test point.
| Algorithm Sort descending | Institution | Precision | Recall | #TP | #FP | #FN | Raw pos. rms error | Pos. rms error | X pos. rms error | Y pos. rms error | Z pos. rms error | Vel. rms error | X vel. rms error | Y vel. rms error | Z vel. rms error | Acc. rms error | X acc. rms error | Y acc. rms error | Z acc. rms error |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PaIRS | Università degli Studi di Napoli “Federico II” | 1.000 | 0.998 | 94684 | 43 | 201 | 0.0899 | 0.0727 | 0.0309 | 0.0326 | 0.0572 | 0.0072 | 0.0032 | 0.00 | 0.0056 | 1.0700 | 0.4850 | 0.4610 | 0.8310 |
| STB | DLR | 0.999 | 0.995 | 94409 | 68 | 476 | 0.1450 | 0.1130 | 0.0492 | 0.0530 | 0.0863 | 0.0083 | 0.0040 | 0.00 | 0.0061 | 0.9050 | 0.4670 | 0.4490 | 0.6310 |
| STB@DaVis | LaVision GmbH | 0.998 | 0.991 | 93985 | 202 | 900 | 0.2140 | 0.1620 | 0.0733 | 0.0787 | 0.1220 | 0.0182 | 0.0096 | 0.01 | 0.0112 | 1.3500 | 0.7320 | 0.7780 | 0.8320 |
| Algorithm Sort descending | Institution | Precision | Recall | #TP | #FP | #FN | Raw pos. rms error | Pos. rms error | X pos. rms error | Y pos. rms error | Z pos. rms error | Vel. rms error | X vel. rms error | Y vel. rms error | Z vel. rms error | Acc. rms error | X acc. rms error | Y acc. rms error | Z acc. rms error |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PaIRS | Università degli Studi di Napoli “Federico II” | 0.999 | 0.998 | 94735 | 51 | 225 | 0.0899 | 0.0807 | 0.0343 | 0.0360 | 0.0636 | 0.0075 | 0.0034 | 0.00 | 0.0059 | 1.0800 | 0.4810 | 0.4600 | 0.8550 |
| STB | DLR | 0.999 | 0.994 | 94437 | 82 | 523 | 0.1460 | 0.1230 | 0.0550 | 0.0575 | 0.0933 | 0.0097 | 0.0046 | 0.00 | 0.0071 | 0.8900 | 0.4690 | 0.4470 | 0.6100 |
| STB@DaVis | LaVision GmbH | 0.994 | 0.978 | 92841 | 538 | 2119 | 0.2210 | 0.2130 | 0.1040 | 0.1150 | 0.1460 | 0.0237 | 0.0126 | 0.01 | 0.0142 | 1.4800 | 0.7940 | 0.8850 | 0.8870 |
| Algorithm Sort descending | Institution | Precision | Recall | #TP | #FP | #FN | Raw pos. rms error | Pos. rms error | X pos. rms error | Y pos. rms error | Z pos. rms error | Vel. rms error | X vel. rms error | Y vel. rms error | Z vel. rms error | Acc. rms error | X acc. rms error | Y acc. rms error | Z acc. rms error |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PaIRS | Università degli Studi di Napoli “Federico II” | 0.999 | 0.998 | 94765 | 57 | 227 | 0.0934 | 0.0895 | 0.0377 | 0.0392 | 0.0711 | 0.0078 | 0.0040 | 0.00 | 0.0056 | 0.9510 | 0.4470 | 0.4200 | 0.7270 |
| STB | DLR | 0.999 | 0.993 | 94372 | 109 | 620 | 0.1470 | 0.1330 | 0.0626 | 0.0609 | 0.1000 | 0.0116 | 0.0063 | 0.01 | 0.0079 | 1.0100 | 0.5540 | 0.4990 | 0.6810 |
| STB@DaVis | LaVision GmbH | 0.989 | 0.929 | 88258 | 955 | 6734 | 0.2460 | 0.2840 | 0.1430 | 0.1580 | 0.1880 | 0.0275 | 0.0151 | 0.02 | 0.0164 | 1.5700 | 0.8610 | 0.9310 | 0.9290 |